Lens 之像差
几何像差(Geometrical Aberration)
几何像差分析单波长光线在光学系统(透镜组)中,由于透镜表面不同位置上折光能力的差异造成的成像面上,光点位置产生偏离造成物、像关系不共轭的现象。
几何像差分析单波长光线在光学系统(透镜组)中,由于透镜表面不同位置上折光能力的差异造成的成像面上,光点位置产生偏离造成物、像关系不共轭的现象。
对着亮度均匀的景物,图像画面四角有变暗的现象,叫做失光或暗角(Vignetting)。暗角对于任何镜头都不可避免,这是由于镜头对于光学折射不均匀造成的。
光学系统大的分类:
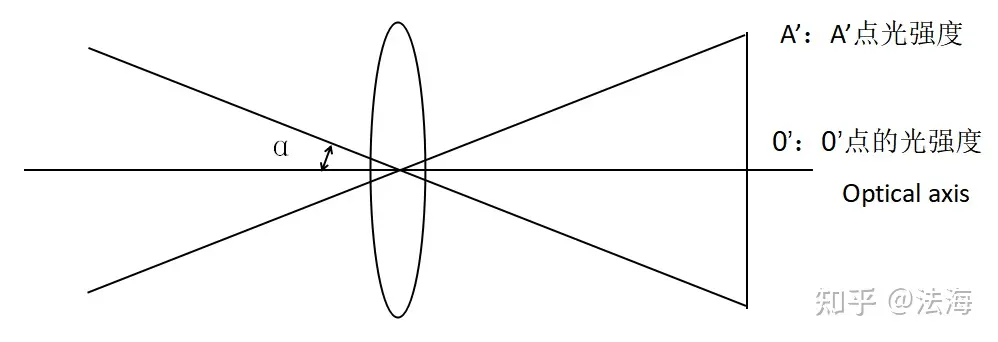
相机景深:其指的是在某个物距之间,还能够清晰成像的距离: 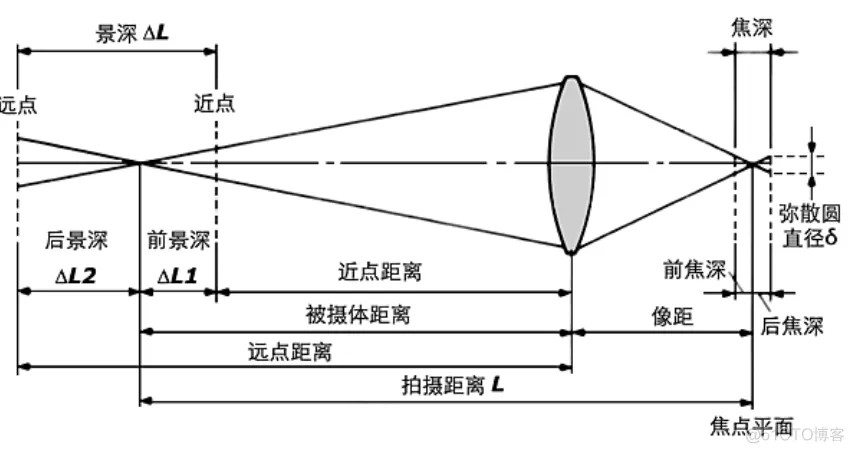
如果 sensor 刚好在像距的位置上,物体的一个点,成的像也就是一个点。如果 sensor 在像距的前面或者后面,这个点也就成了一个圆,专业术语叫弥散圆。当这个圆大到一定的程度的时候,照片也就糊了。
理想 CMOS sensor 的响应特性下图所示: 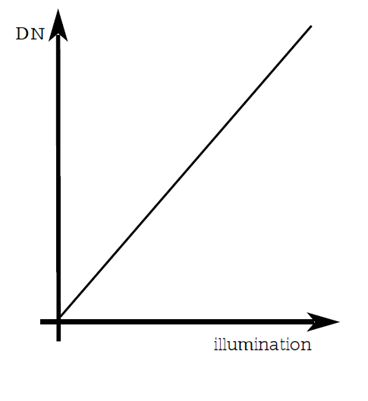
横坐标是光强,纵坐标是 cmos 输出信号,直线的斜率决定了单位输入能够激励的响应大小,这个斜率称为增益系数(gain)。sensor 会提供一组接口用于调节实际生效的增益值。
Microlens(微透镜)。
每个像素点的最上方有个微透镜,增加透光量。有镜头就有 CRA
的问题,超出一定角度的光线无法被收集,需要和镜头进行匹配。 ![]()
Photodiode(硅感光区)捕获光子,激发光生电子。
势阱,用电场捕获、存储光生电子。
电路,将电荷数量变换为电压信号,以及复位、选择、读出逻辑。
滤光膜,选择性透过三种波长中的一种。
绝对磁编码器比较简单,直接读寄存器就可以。实际使用中需要配合径向冲磁的磁铁使用,且最好能远离其他可能造成磁场变化的器件;其次需要注意角度更新频率,动态特性等参数。
SVM 函数的 alpha 和 beta 的值是经过了标幺化,基准值为
(最大相电压),也就是说 alpha 和 beta 的范围是 [-1,1]。约束:alpha-beta
向量的大小不得大于
在基尔霍夫定律下,三相电流的合应该等于 0,因此只需要获取亮相电流就可以重构出完整的三相电流。
对于 STM32 一般通过高级定时器的 channel4 作为 ADC
的触发源,对于下桥臂电流采样,需要在下桥臂 MOS
管导筒的时候才能去采样,而且需要在 MOS
管导通时间以及电流稳定后才能采样到比较可靠的电流。 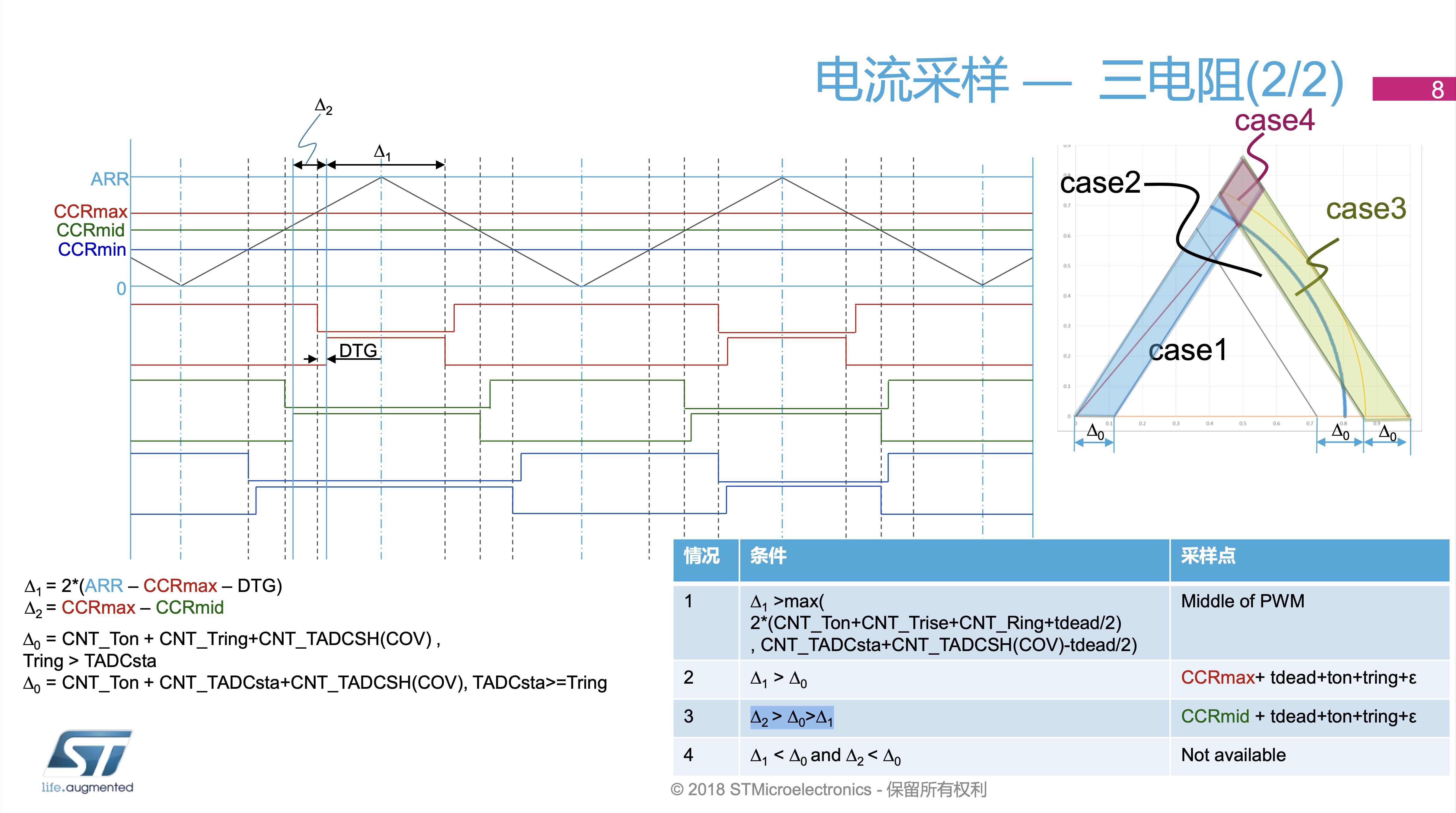
运动特性为两轮差速驱动,其底部后方两个同构驱动轮的转动为其提供动力,前方的随动轮起支撑作用并不推动其运动,如下图两轮差速驱动示意图所示。
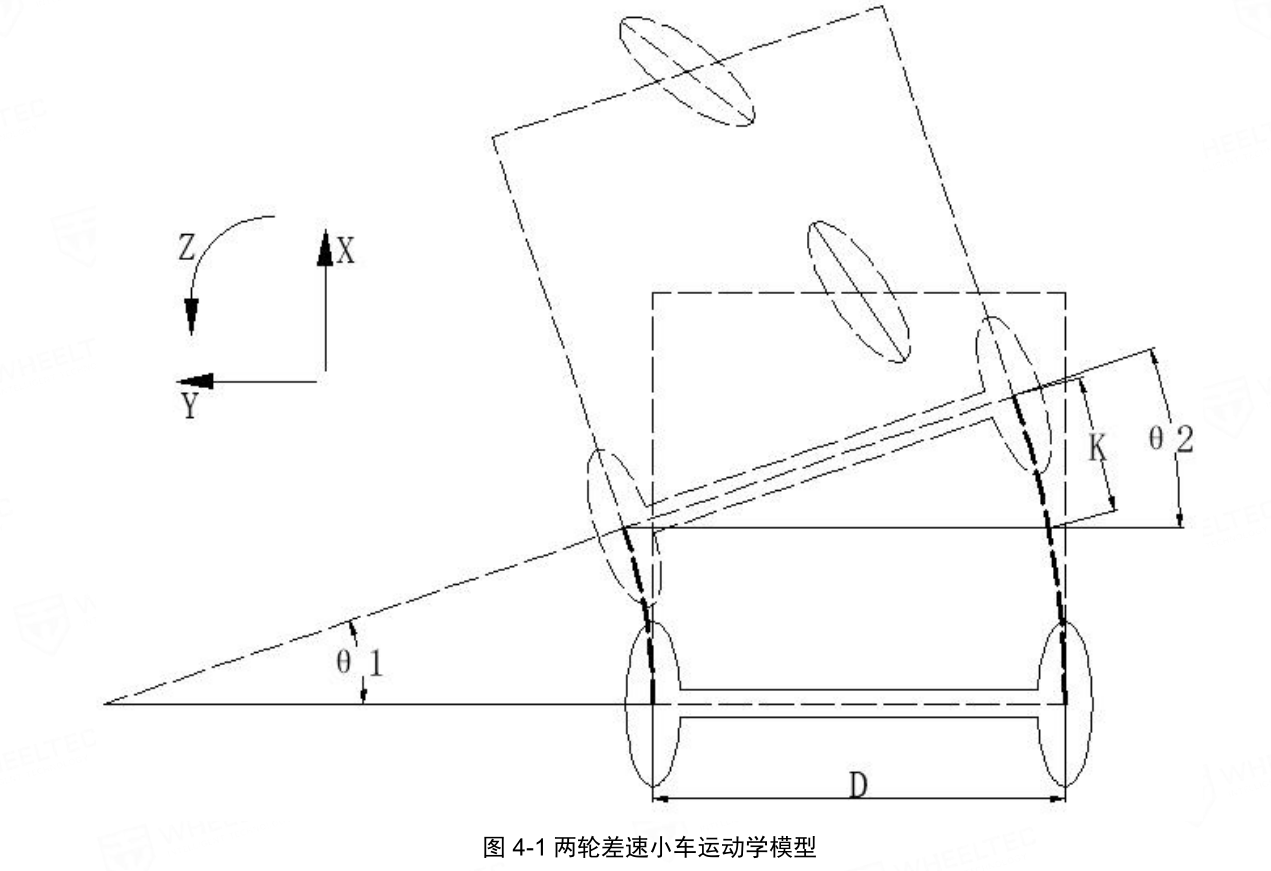
机器人的运动简化模型如图 4-1 所示,X 轴正方向为前进、Y
轴正方向为左平移、Z 轴正方向为逆时针。机器人两个轮子之间的间距为
D,机器人 X 轴和 Z 轴的速度分别为:
假设机器人往一个左前的方向行进了一段距离,设机器人的右轮比左轮多走的距离近似为
K, 以机器人的轮子上的点作为参考点做延长参考线,可得: