SVM 函数的 alpha 和 beta 的值是经过了标幺化,基准值为 (最大相电压),也就是说 alpha 和 beta 的范围是 [-1,1]。约束:alpha-beta 向量的大小不得大于 $ \frac{\sqrt{3}}{2} $。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 std ::tuple<float , float , float , bool > SVM (float alpha, float beta) { float tA, tB, tC; int Sextant; if (beta >= 0.0f ) { if (alpha >= 0.0f ) { if (one_by_sqrt3 * beta > alpha) Sextant = 2 ; else Sextant = 1 ; } else { if (-one_by_sqrt3 * beta > alpha) Sextant = 3 ; else Sextant = 2 ; } } else { if (alpha >= 0.0f ) { if (-one_by_sqrt3 * beta > alpha) Sextant = 5 ; else Sextant = 6 ; } else { if (one_by_sqrt3 * beta > alpha) Sextant = 4 ; else Sextant = 5 ; } } switch (Sextant) { case 1 : { float t1 = alpha - one_by_sqrt3 * beta; float t2 = two_by_sqrt3 * beta; tA = (1.0f - t1 - t2) * 0.5f ; tB = tA + t1; tC = tB + t2; } break ; case 2 : { float t2 = alpha + one_by_sqrt3 * beta; float t3 = -alpha + one_by_sqrt3 * beta; tB = (1.0f - t2 - t3) * 0.5f ; tA = tB + t3; tC = tA + t2; } break ; case 3 : { float t3 = two_by_sqrt3 * beta; float t4 = -alpha - one_by_sqrt3 * beta; tB = (1.0f - t3 - t4) * 0.5f ; tC = tB + t3; tA = tC + t4; } break ; case 4 : { float t4 = -alpha + one_by_sqrt3 * beta; float t5 = -two_by_sqrt3 * beta; tC = (1.0f - t4 - t5) * 0.5f ; tB = tC + t5; tA = tB + t4; } break ; case 5 : { float t5 = -alpha - one_by_sqrt3 * beta; float t6 = alpha - one_by_sqrt3 * beta; tC = (1.0f - t5 - t6) * 0.5f ; tA = tC + t5; tB = tA + t6; } break ; case 6 : { float t6 = -two_by_sqrt3 * beta; float t1 = alpha + one_by_sqrt3 * beta; tA = (1.0f - t6 - t1) * 0.5f ; tC = tA + t1; tB = tC + t6; } break ; } bool result_valid = tA >= 0.0f && tA <= 1.0f && tB >= 0.0f && tB <= 1.0f && tC >= 0.0f && tC <= 1.0f ; return {tA, tB, tC, result_valid}; }
函数主体上可以分为 2 大块,第一大块是个复合的 if 语句,用于判断扇区,第二个则是个 switch 语句,用于计算定时器的比较值,用于产生不同占空比的 PWM。
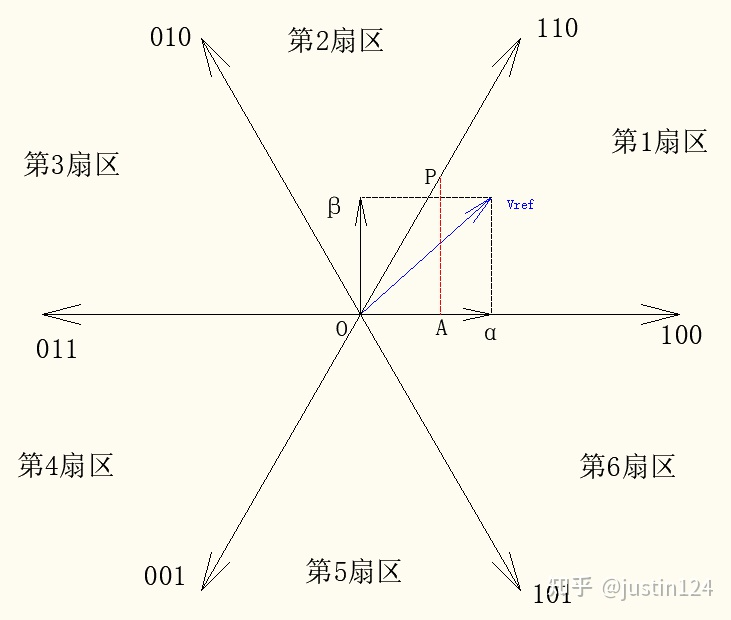
对于第一部分扇区判断,以第 1 扇区为例说明。
如图 1 所示,给定的$ \alpha \beta 值使得其合向量蓝色的 值使得其合向量蓝色的 值 使 得 其 合 向 量 蓝 色 的 位于第 1 扇区。分析一下位于第 1 扇区的 位于第 1 扇区。分析一下位于第 1 扇区的 位 于 第 1 扇 区 。 分 析 一 下 位 于 第 1 扇 区 的 有什么特点,最明显的就是,但这应该是位于第一象限的特点,还有 30 ° 的范围不属于第 1 扇区,继续分析。每个扇区都是 60 ° ,因此可以通过三角函数来确定 有什么特点,最明显的就是 ,但这应该是位于第一象限的特点,还有 30°的范围不属于第 1 扇区,继续分析。每个扇区都是 60°,因此可以通过三角函数来确定 有 什 么 特 点 , 最 明 显 的 就 是 , 但 这 应 该 是 位 于 第 一 象 限 的 特 点 , 还 有 3 0 ° 的 范 围 不 属 于 第 1 扇 区 , 继 续 分 析 。 每 个 扇 区 都 是 6 0 ° , 因 此 可 以 通 过 三 角 函 数 来 确 定 和 和 和 的关系。过 110 轴上任意点 P 做 100 轴的垂线 P A ,则 Δ O P A 显然为直角三角形,且 ∠ P A O = 90 ° , ∠ P O A = 60 ° , ∠ O P A = 30 ° ,此时,正好是 的关系。过 110 轴上任意点 P 做 100 轴的垂线 PA,则ΔOPA 显然为直角三角形,且∠PAO=90°,∠POA=60°,∠OPA=30°,此时,正好是 的 关 系 。 过 1 1 0 轴 上 任 意 点 P 做 1 0 0 轴 的 垂 线 P A , 则 Δ O P A 显 然 为 直 角 三 角 形 , 且 ∠ P A O = 9 0 ° , ∠ P O A = 6 0 ° , ∠ O P A = 3 0 ° , 此 时 , 正 好 是 的合向量恰好位于 110 轴的情形,当 的合向量恰好位于 110 轴的情形,当 的 合 向 量 恰 好 位 于 1 1 0 轴 的 情 形 , 当 的值略小或 的值略小或 的 值 略 小 或
∠ P O A = a r c t a n P A O A = a r c t a n β α < 60 ° \angle POA = arctan \frac{PA}{ OA} = arctan \frac{\beta}{ \alpha} < 60°
∠ P O A = a r c t a n O A P A = a r c t a n α β < 6 0 °
即可作为 1 扇区判断条件,坏消息是 arctan 在 MCU 上计算得慢,所以得换换思路。
t a n ∠ P O A = β α tan \angle POA = \frac{\beta}{ \alpha}
t a n ∠ P O A = α β
这是一个显而易见的结论,当合向量恰好位于 110 轴时$ tan60° = \frac{\beta}{ \alpha} $ ,也就是$ \beta = \sqrt{3} \alpha$ ,如果和程序中的表述一致的话,就是α = 1 3 β \alpha = \frac{1}{ \sqrt{3}} \beta α = 3 1 β β \beta β α \alpha α α \alpha α β \beta β
综上所述得到结论,当$\alpha > 0, \beta > 0 $ 且 β > 3 α \beta > \sqrt{3} \alpha β > 3 α β < 3 α \beta < \sqrt{3} \alpha β < 3 α
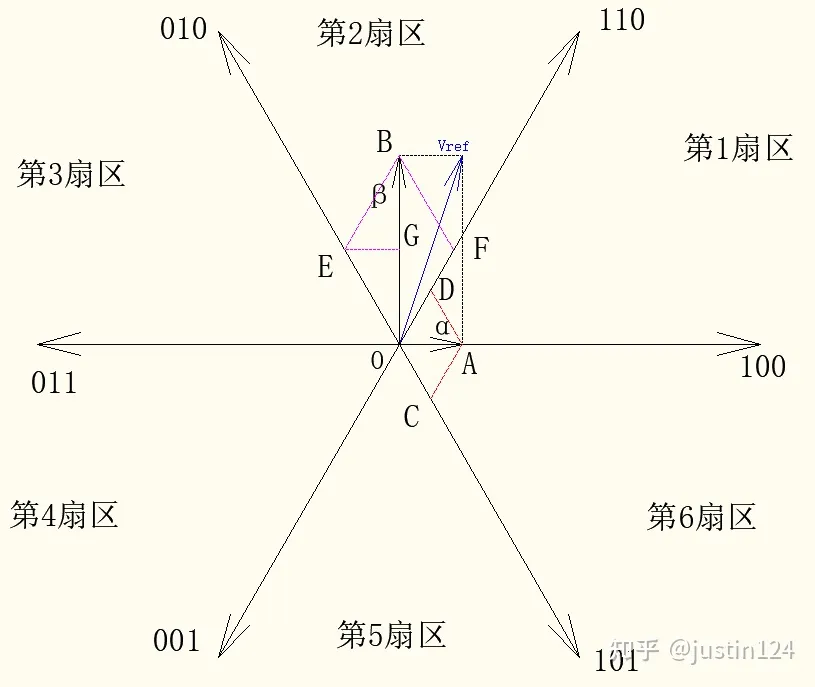
接下来聊一聊 PWM 比较值是如何计算的,这次以第 2 扇区为例,如图 2 所示。
在第 2 扇区的合向量是需要借助 010 和 110 这两个基本向量合成得到,传入 SVM 函数的参数 alpha 和 beta 的合向量是V r e f Vref V r e f α \alpha α β \beta β α \alpha α β \beta β
先试着分解α \alpha α α \alpha α α \alpha α − α - \alpha − α
然后分解β \beta β △ O B E 、 △ O B F \bigtriangleup OBE 、 \bigtriangleup OBF △ O B E 、 △ O B F △ E G B \bigtriangleup EGB △ E G B ∠ E B G = 30 ° \angle EBG = 30° ∠ E B G = 3 0 ° B E = 2 3 B G BE = \frac{2}{\sqrt{3}} BG B E = 3 2 B G B G = 1 2 β BG = \frac{1}{2} \beta B G = 2 1 β B E = 1 3 β BE = \frac{1}{\sqrt{3}} \beta B E = 3 1 β
t 3 = − α + 1 3 β t3 = - \alpha + \frac{1}{\sqrt{3}} \beta
t 3 = − α + 3 1 β
t 2 = α + 1 3 β t2 = \alpha + \frac{1}{\sqrt{3}} \beta
t 2 = α + 3 1 β
odriver speed [[odriverSpeed]]
https://zhuanlan.zhihu.com/p/506240030

)




