相机校准模型
小孔成像模型
各坐标系定义及相机的内参和外参
像素坐标系
像素坐标就是像素在图像中的位置。一般像素坐标系的左上角的顶点就是原点,水平向右是
u,垂直向下是 v 轴。 ![]()
图像坐标系
在像素坐标系中,每个像素的坐标是用像素来表示的,然而,像素的表示方法却不能反应图像中物体的物理尺寸,因此,有必要将像素坐标转换为图像坐标。将像素坐标系的原点平移到图像的中心,就定为图像坐标系的原点,图像坐标系的
x 轴与像素坐标系的 u 轴平行,方向相同,而图像坐标系的 y 轴与像素坐标系的
v 轴平行,方向相同。 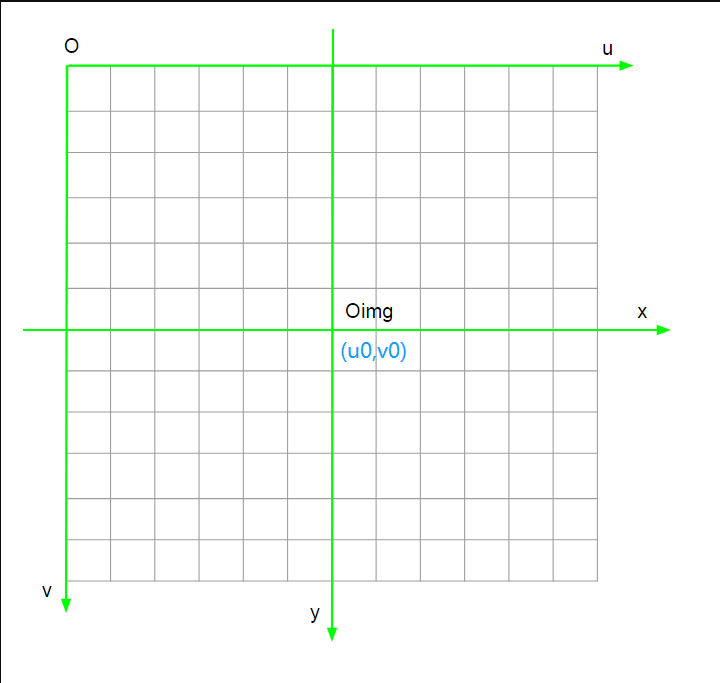
在图中,假设在像素坐标系下图像中心的像素坐标是(u0,v0),相机中感光器件每个像素的物理尺寸是 dx * dy,那么,图像坐标系的坐标(x,y)与像素坐标系的坐标(u,v)之间的关系可以表示为:
\[u = \frac{x}{d_x} + u_0 \\ v = \frac{y}{d_y} + v_0 \]
写成矩阵的形式就为:
\[\begin{bmatrix} u \\ v \end{bmatrix} = \begin{bmatrix} \frac{1}{d_x} & 0 \\ 0 & \frac{1}{d_y} \end{bmatrix}\begin{bmatrix} x \\ y \end{bmatrix} + \begin{bmatrix} u_0\\ v_0 \end{bmatrix}\]
改写为齐次坐标的形式:
\[\begin{bmatrix} u \\ v \\ 1 \end{bmatrix} = \begin{bmatrix} \frac{1}{d_x}& 0 &0 \\ 0 & \frac{1}{d_y} & 0\\ 0 & 0 & 0 \end{bmatrix} \begin{bmatrix} x \\ y \\ 0 \end{bmatrix} + \begin{bmatrix} u_o \\ v_o \\ 1 \end{bmatrix} = \begin{bmatrix} \frac{1}{d_x}& 0 &u_o \\ 0 & \frac{1}{d_y}& v_0\\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix}\]
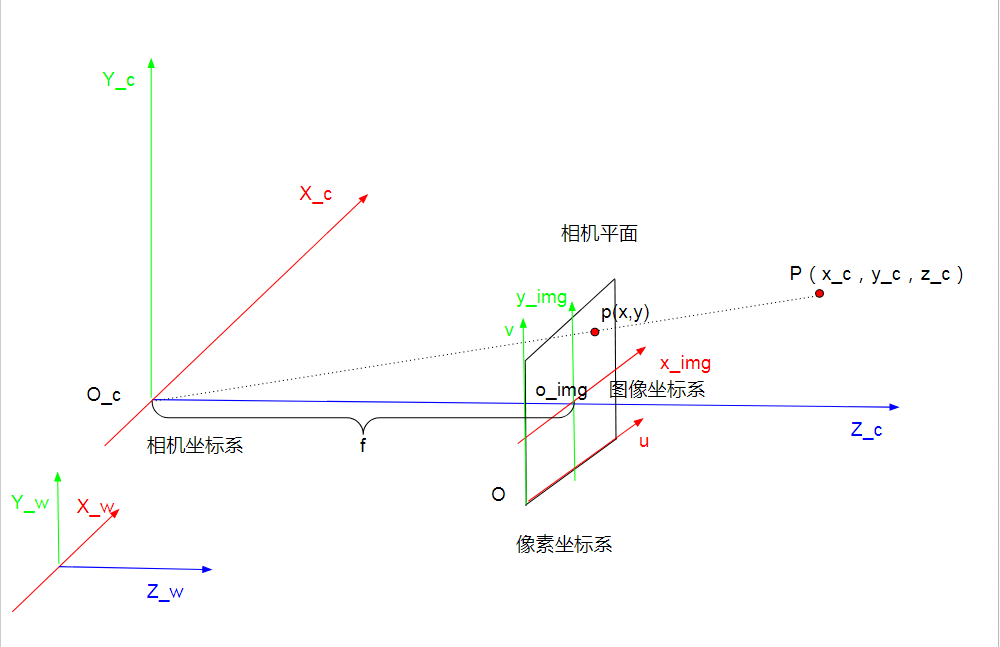
相机坐标系
相机坐标系是以相机的光轴作为 Z
轴,光线在相机光学系统的中心位置就是原点 Oc(实际上就是透镜的中心),
相机坐标系的水平轴 Xc 与垂直轴 Yc 分别于图像坐标系的 X 轴和 Y
轴平行。在图中,相机坐标系的原点与图像坐标系的原点之间的距离 OcOi
之间的距离为 f(也就是焦距)。 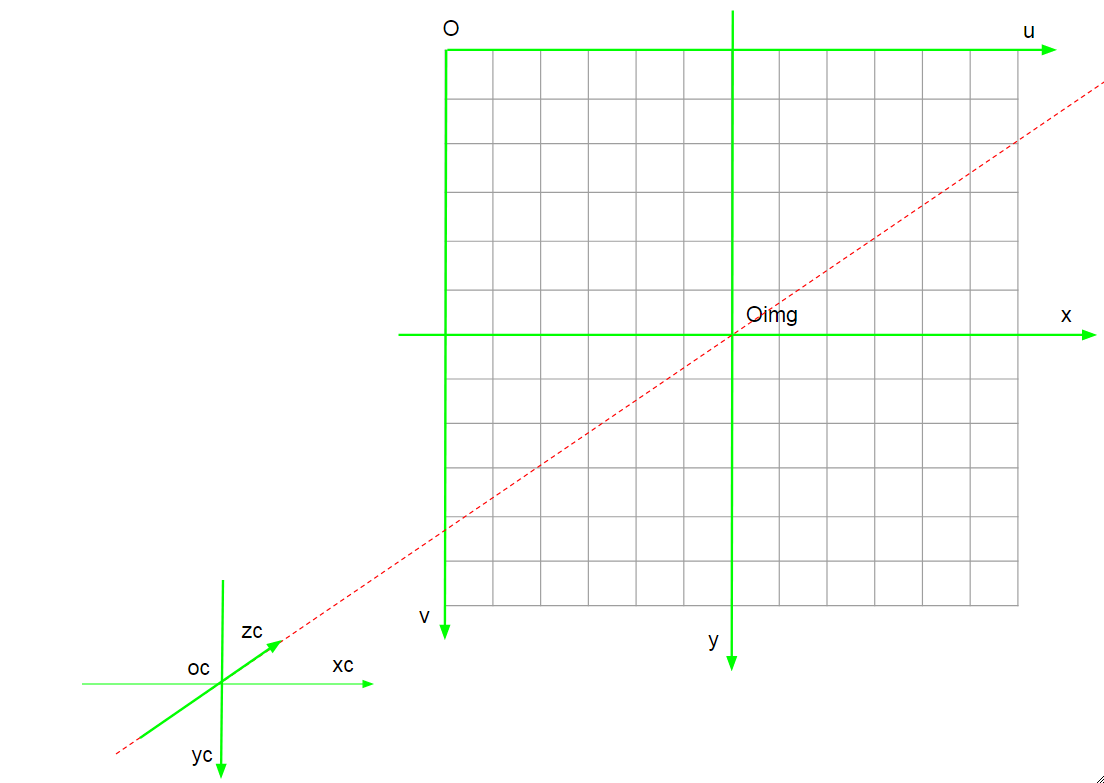
假设,三维空间中点 P, 其在相机坐标系下坐标为\(P_c = [x_c,y_c,z_c]^T\); 其像点
p,在图像坐标系中坐标为。 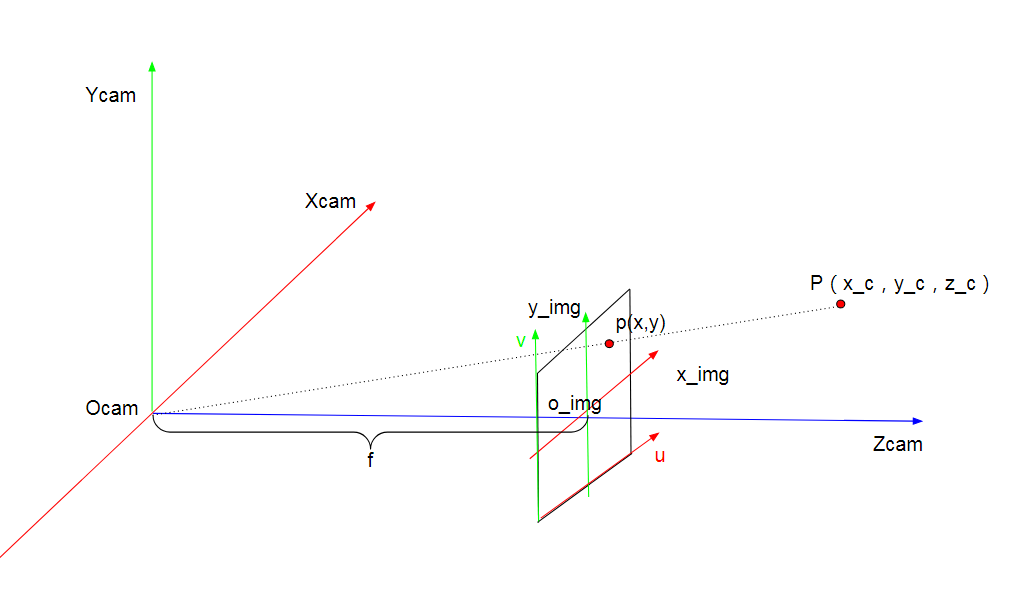
由相似三角形原理,得到
\[\frac{f}{z_c} = \frac{x}{x_c} = \frac{y}{y_c} \\ x = f \frac{x_c}{z_c}, y = f \frac{y_c}{z_c} \]
用向量表示为:
\[\begin{bmatrix} x\\ y\\ 1 \end{bmatrix} = \frac{1}{z_c}\begin{bmatrix} f &0 &0 \\ 0 & f & 0\\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x_c\\ y_c\\ z_c \end{bmatrix}\]
进一步可以写为:
\[ \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} = \begin{bmatrix} \frac{1}{d_x}& 0 &u_o \\ 0 & \frac{1}{d_y}& v_0\\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} = \frac{1}{z_c}\begin{bmatrix} \frac{f}{d_x}& 0 &u_o \\ 0 & \frac{f}{d_y}& v_0\\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x_c\\ y_c\\ z_c \end{bmatrix} \]
到这里\(\begin{bmatrix} \frac{f}{d_x}& 0 &u_o \\ 0 & \frac{f}{d_y}& v_0\\ 0 & 0 & 1 \end{bmatrix}\) 就是相机的内参矩阵,跟相机的焦距和传感器的大小等参数有关。
世界坐标系
界坐标系是图像与真实物体之间的一个映射关系。如果是单目视觉的话,主要就是真实物体尺寸与图像尺寸的映射关系。如果是多目视觉的话,那么就需要知道多个相机之间的关系,这个关系就需要在同一个坐标系下进行换算。在下图中,世界坐标系的原点是
Ow, 而 Xw,Yw,Zw
轴并不是与其他坐标系平行的,而是有一定的角度,并且有一定的平移。
对于世界坐标系到相机坐标系的转换是刚体变换,是旋转动作和平移动作的结果,如下:
\[\begin{bmatrix} x_c\\ y_c\\ z_c\\ 1 \end{bmatrix} = \begin{bmatrix}R & t\\ 0 & 1 \end{bmatrix}\begin{bmatrix} x_w\\ y_w\\ z_w\\ 1 \end{bmatrix}\]
这里\(\begin{bmatrix}R & t\\ 0 & 1 \end{bmatrix}\)就是相机的外参矩阵,R 是相机相对世界坐标系的旋转关系,t 是相机相对于世界坐标系的平移关系,当相机位姿发生变化,该参数也相应的发生变化**。
图像畸变及畸变矫正
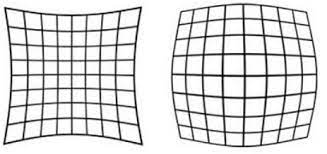
径向畸变
径向畸变:是由于透镜形状的制造工艺导致,且越向透镜边缘移动径向畸变越严重,实际情况中我们常用
r=0
处的泰勒级数展开的前几项来近似描述径向畸变,矫正径向畸变前后的坐标关系为:
径向畸变的矫正公式如下:
\[ \begin{aligned} &x_{rad}=x(1+k_1r^2+k_2r^4+k_3r^6) \\ &y_{rad}=y(1+k_1r^2+k_2r^4+k_3r^6) \end{aligned} \]
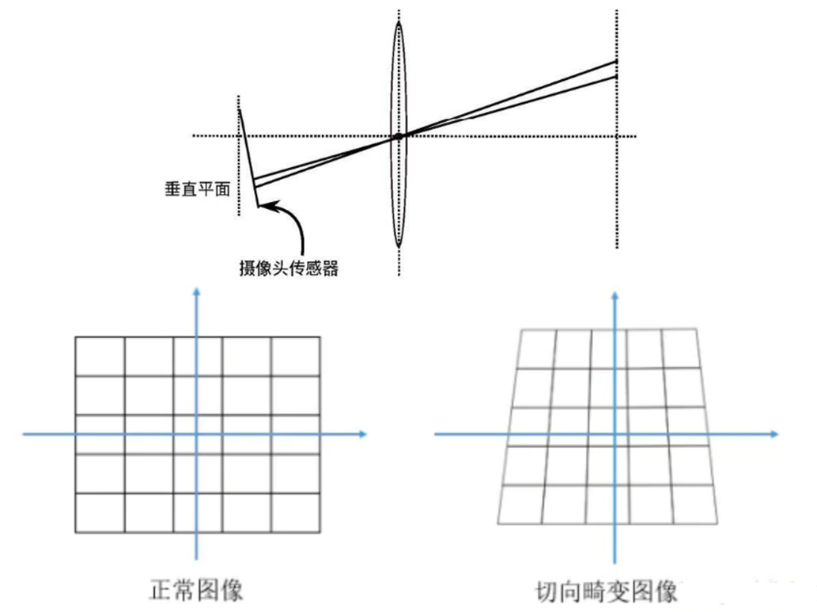
切向畸变
切向畸变:是由于透镜和 CMOS 或者 CCD
的安装位置误差导致,切向畸变需要两个额外的畸变参数来描述,矫正前后的坐标关系为:
切向畸变的矫正公式如下(这里不给出推导过程,直接使用):
\[ x_{tan}=x+2p_1xy+p_2(r^2+2x^2)\\y_{tan}=y+p_1(r^2+2y^2)+2p_2xy \]
畸变矫正
综合以上两种畸变,得到相机的畸变模型(纠正后的图像像素坐标系的坐标):
\[ \begin{aligned} &r^2=x^2+y^2 \\ &x_{distorted}=x(1+k_1r^2+k_2r^4+k_3r^6)+2p_1xy+p_2(r^2+2x^2) \\ &y_{distorted}=y(1+k_1r^2+k_2r^4+k_3r^6)+p_1(r^2+2y^2)+2p_2xy \end{aligned} \]
其中 x,y 是是去畸变后的图像坐标,它是归一化的坐标,以图像中心为原点。r 为半径。\(x_{distorted}y_{distorted}\)是具有畸变得图像坐标。