差速轮运动学解算
差速轮运动学模型
机器人坐标系下的变换
运动特性为两轮差速驱动,其底部后方两个同构驱动轮的转动为其提供动力,前方的随动轮起支撑作用并不推动其运动,如下图两轮差速驱动示意图所示。
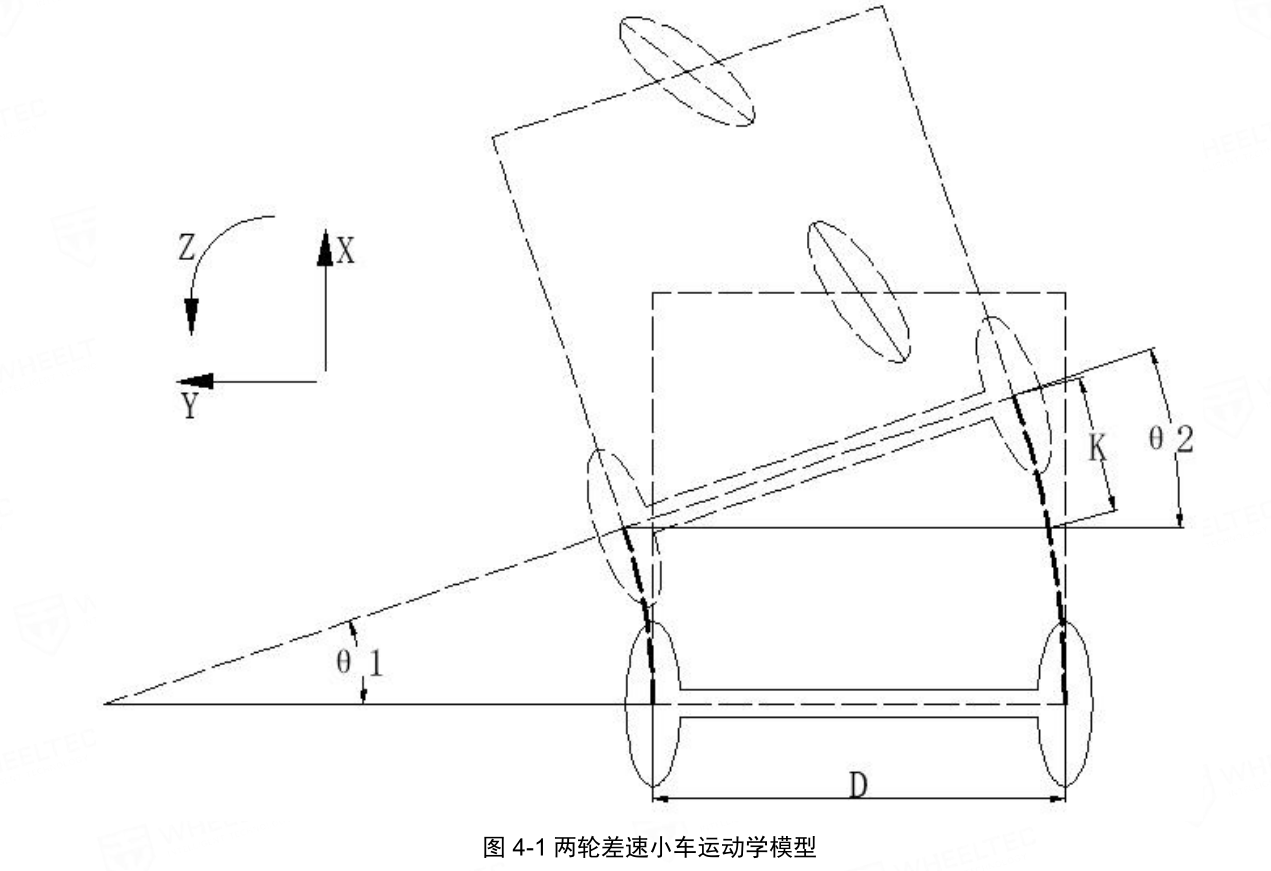
机器人的运动简化模型如图 4-1 所示,X 轴正方向为前进、Y 轴正方向为左平移、Z 轴正方向为逆时针。机器人两个轮子之间的间距为 D,机器人 X 轴和 Z 轴的速度分别为:\(V_x\)和\(V_z\) ,机器人左轮和右轮的速度分别为:\(V_l\) 和\(V_r\)。
假设机器人往一个左前的方向行进了一段距离,设机器人的右轮比左轮多走的距离近似为 K, 以机器人的轮子上的点作为参考点做延长参考线,可得:\(θ_1 = θ_2\) 。由于这个\(Δ_t\) 很小,因此角度的变化量\(θ_1\) 也很小,因此有近似公式:
\[ \theta_{2} \approx \sin \left(\theta_{2}\right)=\frac{K}{D} \]
由数学分析可以得到下面的式子:
\[ \begin{equation} \mathrm{K}=\left(\mathrm{V}_{\mathrm{R}}-\mathrm{V}_{\mathrm{L}}\right) * \Delta \mathrm{t}, \quad \omega=\frac{\theta_{1}}{\Delta \mathrm{t}} \end{equation} \]
由上面的公式和式子可以求解出运动学正解的结果:机器人 X 轴方向速度
\[ V_x=(V_l+V_r) / 2 \]
机器人 Z 轴方向速度:
\[ V_z=(V_r - V_l)/D \]
由正解直接反推得出运动学逆解的结果:
机器人左轮的速度:
\[ V_l = V_x -(V_z * D)/2 \]
机器人右轮的速度:
\[ V_r = V_x +(V_z * D)/2 \]
实现
运动学正解
1 | /** |
运动学逆解
1 | /** |
坐标系旋转
全局坐标系到机器人坐标系的变换
一个平面坐标系逆时针旋转一个角度后得到另一个坐标系,则同一个点在这两个坐标系之间的几何关系如下:
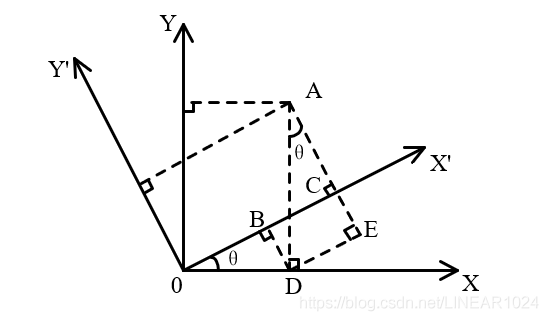
由上图可得:
\[ \begin{equation} \begin{aligned} x^{\prime} &=O B+B C \\ &=O D \cos \theta+A D \sin \theta \\ &=x \cos \theta+y \sin \theta \end{aligned} \end{equation} \]
\[ \begin{equation} \begin{aligned} y^{\prime} &=A E-C E \\ &=A D \cos \theta-O D \sin \theta \\ &=y \cos \theta-x \sin \theta \end{aligned} \end{equation} \]
则反过来的关系如下:
\[ \begin{equation} \left[\begin{array}{l} x \\ y \end{array}\right]=\left[\begin{array}{cc} \cos \theta & -\sin \theta \\ \sin \theta & \cos \theta \end{array}\right]\left[\begin{array}{l} x^{\prime} \\ y^{\prime} \end{array}\right] \end{equation} \]
则反过来的关系如下:
\[ \begin{equation} \left[\begin{array}{l} x \\ y \end{array}\right]=\left[\begin{array}{cc} \cos \theta & -\sin \theta \\ \sin \theta & \cos \theta \end{array}\right]\left[\begin{array}{l} x^{\prime} \\ y^{\prime} \end{array}\right] \end{equation} \]
实现
正解
1 | /** |
逆解
1 | /** |
参考文献
https://www.guyuehome.com/33953
https://blog.csdn.net/LINEAR1024/article/details/104956774
https://www.guyuehome.com/8392