ISP Raw 域之 BayerDemosaic
Bayer Demosaic 概述
RAW 域的最后一步处理是 Demosaic,将像素从 RAW 域变换到 RGB
域进行下一阶段的处理。Demosaic 算法的主要难点在于,RAW
域的任何一个像点(photosite)只包含一个真实的采样值,而构成像素(R,G,B)的其它两个值需要从周围像点中预测得到。既然是预测,就一定会发生预测不准的情况,这是不可避免的,而预测不准会带来多种负面影响,包括拉链效应(zipper
artifacts),边缘模糊,颜色误差等。 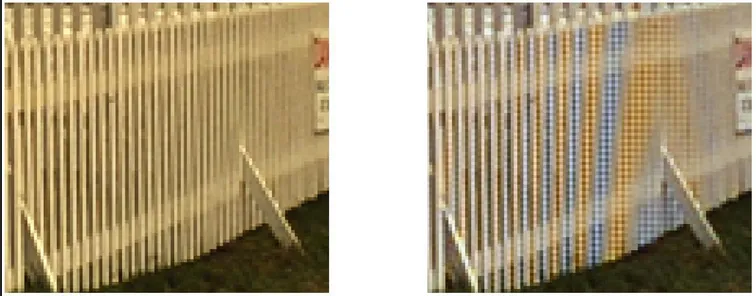
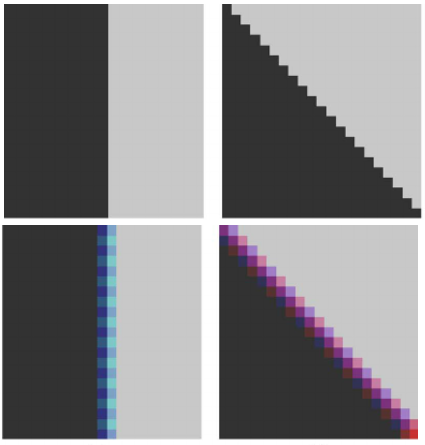
所以 Demosaic 算法的主要挑战就是尽量提高算法的准确性,减少图像边缘损失和颜色误差。
Bayer 格式图像色彩恢复时有两种思路:
- 无方向性插值:不加边缘方向判断(思路:临近像素的均值),直接利用周围像素信息恢复。
- 有方向性插值:先判断边缘方向,再利用周围像素信息恢复。
Bayer 格式图像的绿色成分占比例较多,信息较丰富,色彩恢复时步骤通常是:a、先恢复 G 通道;b、再利用 G 通道信息恢复 R、B 通道。
CFA 双线性插值
无边缘检测

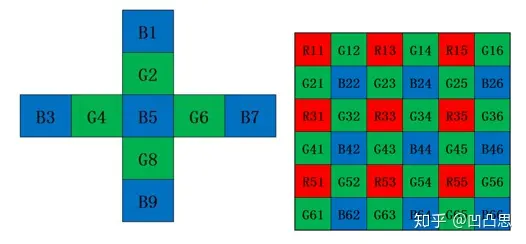
绿色像素上的 R,B 值分别由相邻的 2 个 R,B 像素的灰度求平均值得到。 以象素点 (2,3) 为例,即已知 G23 该点的 R,B 值计算公式如下:
红、蓝像素上的 G 值由相邻的 4 个绿色像素求平均值得到。 如图中象素点 (3,3) 和 (4,4),即已知 R33 和 B44 这两点的绿色分量值表示为
红色像素上的 B 值由对角线上相邻的 4 个 B 像素平均得到。象素点 (3,3) ,R33 的 B 值表示为。
边缘检测,直接采用最近临同色像素的均值求解,图像边缘不够清晰,算法简单。
基于边缘检测和色差的 CFA 插值:Hibbard 原理
G 分量的恢复加入了相邻 G 通道的一阶微分方向判断因子。使用周围 G 通道值信息。
恢复采样点 R 和 B 点的绿色分量:例 B44。 梯度因子:水平方向 H
对 R、B 分量插值。基本思想是在图片的小平滑区域内,色差恒定的。假设像素点 P(i,j) 邻近的一个像素点是 P(m,n) 则有:
G 通道有边缘检测采用相邻 G,恢复无色差、色度信息,R、B 通道无边缘检测,恢复采用色差信息。效果接近原始图,算法难度适中。
基于边缘检测和色差的 CFA 插值:laroche 原理
G 分量的恢复改用相邻 R 或 B 通道的二阶微分方向判断因子;恢复时使用相邻 G 通道信息。 R、B 分量的恢复同 Hibbard 使用色差原理。
恢复采样点 R 和 B 点的绿色分量:例 B44。 梯度因子:水平方向 H:
G 通道有边缘检测采用相邻 B 色度信息,恢复用均值无色差信息、色度信息,R、B 通道无边缘检测,恢复采用色差信息。效果接近原始图,算法难度适中。
基于边缘、色度和色差自适应插值
G 分量的恢复改用相邻 R 或 B 的二阶微分加 G 通道的一阶微分方向判断因子;R、B 分量的恢复使用了色差原理。
恢复绿色分量 G。 已知 B44, 水平方向梯度和色度算子:
若已知 R33,求 B33。 B 分量的恢复采用相邻 G 的二阶微分加 B 通道的一阶微分方向判断因子;B 分量的恢复使用了色差原理 先求对角线方向的梯度和色度算子
已知 B44,求 R44。 先求对角线方向的梯度和色度算子 R 分量的恢复采用相邻 G 的二阶微分加 R 通道的一阶微分方向判断因子;R 分量的恢复使用了色差原理。
如已知 G43。 红色分量表达式:
如已知 G34。 红色分量表达式:
R、G、B 通道分别进行了边缘检测,颜色恢复时采用了色差信息及其他通道的信息。效果接近原始图,算法难度较大。
基于边缘、色度和色差自适应插值之标志位:减少 False color
G 分量的恢复改用相邻 R 或 B 的二阶微分加 G 通道的一阶微分方向判断因子;并采用标志因子的统计,R、B 分量的恢复使用了色差原理。
- 对每个像素计算水平和垂直方向梯度和色度算子。
- 比较两个方向的算子大小,用 0 或 1 标记。
- 统计局部区域内如 3x3 窗口统计邻域九个位置的 flag 之和即 total_flag。
- 设置阈值,判断该像素在局部区域内最可能的方向。
对于图 (a): 已知 B5 水平方向方向算子:
竖直方向方向算子: 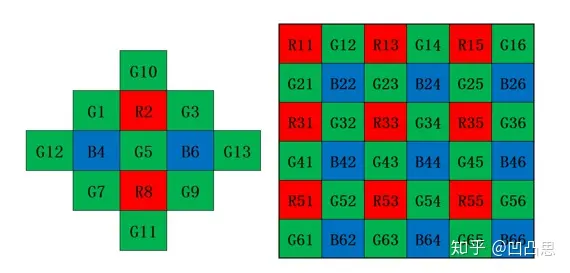
对于图 (b): 已知 G5(G43) 水平方向方向算子:
竖直方向方向算子:
标志位: flag=1,Gh<Gv; flag=0,else 已知 G34 和 R33,flag 计算方法同理。
根据阈值判断方向的方法:
对于 B 和 R 位置,取 3x3 窗口,统计邻域九个位置的 flag 之和即 total_flag,在 [0.9] 之间,越大水平方向边界可能性越大,越小竖直方向为边界可能性越大。
取 high_thresh 和 low_thresh,判断边界方向。
total_flag > = high_thresh,水平方向存在边界,插值沿水平方向进行;
total_flag =< low_thresh,竖直方向存在边界,插值沿竖直方向进行;
low_thresh < total_flag < high_thresh,为平滑区域,插值在整个区域进行;
经验值, high_thresh 和 low_thresh 取 7 和 3.
插值方法同上。
有局部区域内边缘方向的整体判断,使得边缘方向判断更加准确。
CFA 插值,还有其他一些比较经典的算法:基于色比的算法;2003 年提出的 Lu 算法;基于权重的 CFA 插值算法;去 False color 的改进算法;其他一些在此基础上改进的算法等等
插值评价方法: 取一张 RGB 三色图像,按照 Bayer 格式取出对应的像素,构成 Bayer 格式图,然后经过 CFA 插值算法插值形成插值后图像。
评价参数:
- 颜色均方误差(CMSE):插值前与插值后图像的对应像素间的差值(绝对值,方差值)之和的平均值。越小越重建接近原图,重建质量越高。
- 例颜色峰值信噪比(Color Peak Signal to Noise Ratio ,CPSNR):越大越重建接近原图,重建质量越高。
参考文献
https://zhuanlan.zhihu.com/p/98820927
https://zhuanlan.zhihu.com/p/40626620
预览: