
WordPress搭建博客
准备 LAMP 环境
安装wordpress
1 | wget https://cn.wordpress.org/latest-zh_CN.zip |
安装Mysql
1 | sudo apt install mysql-server -y |
Linux 中断子系统(二)ARM64 的异常处理过程
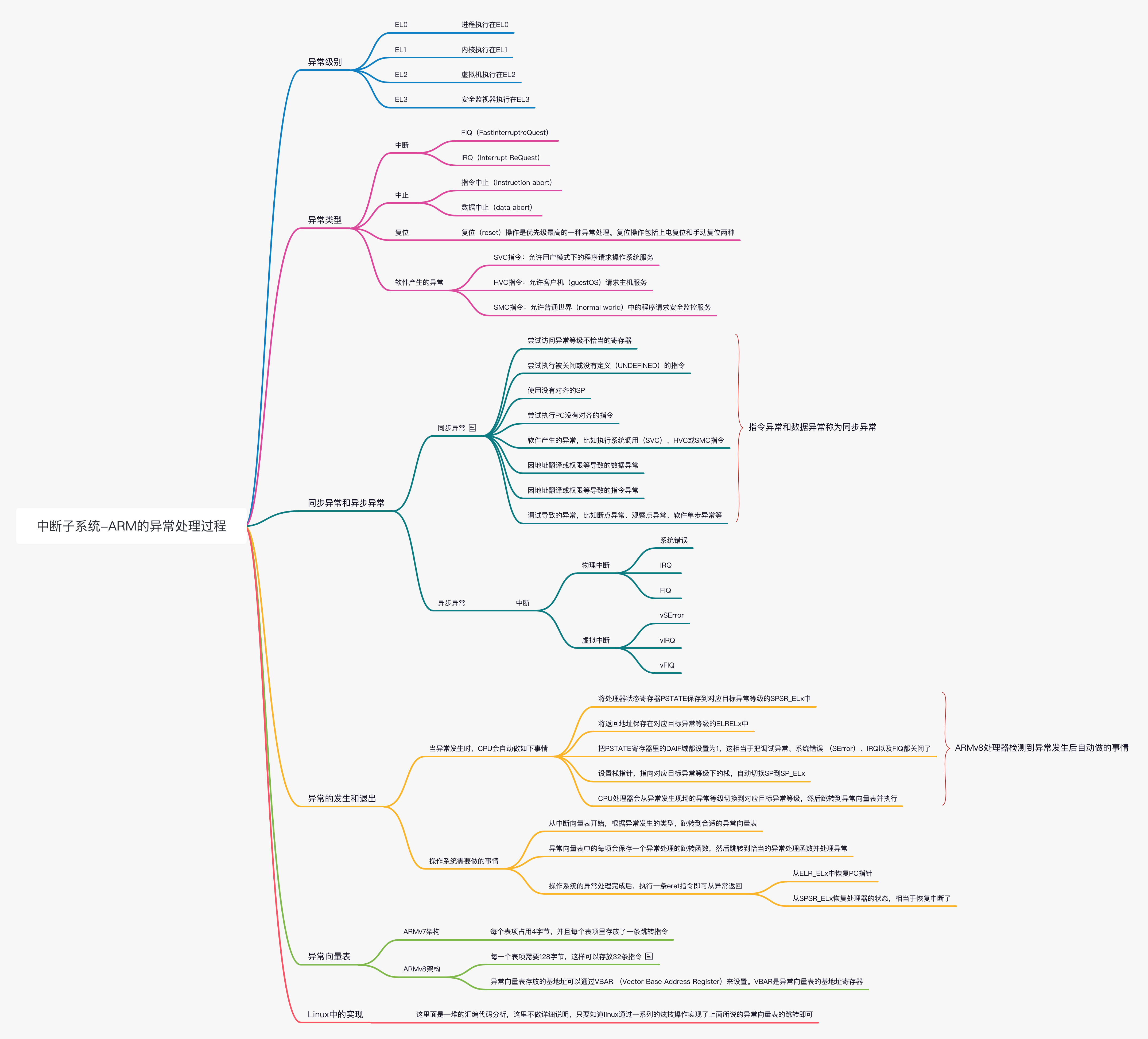
异常级别
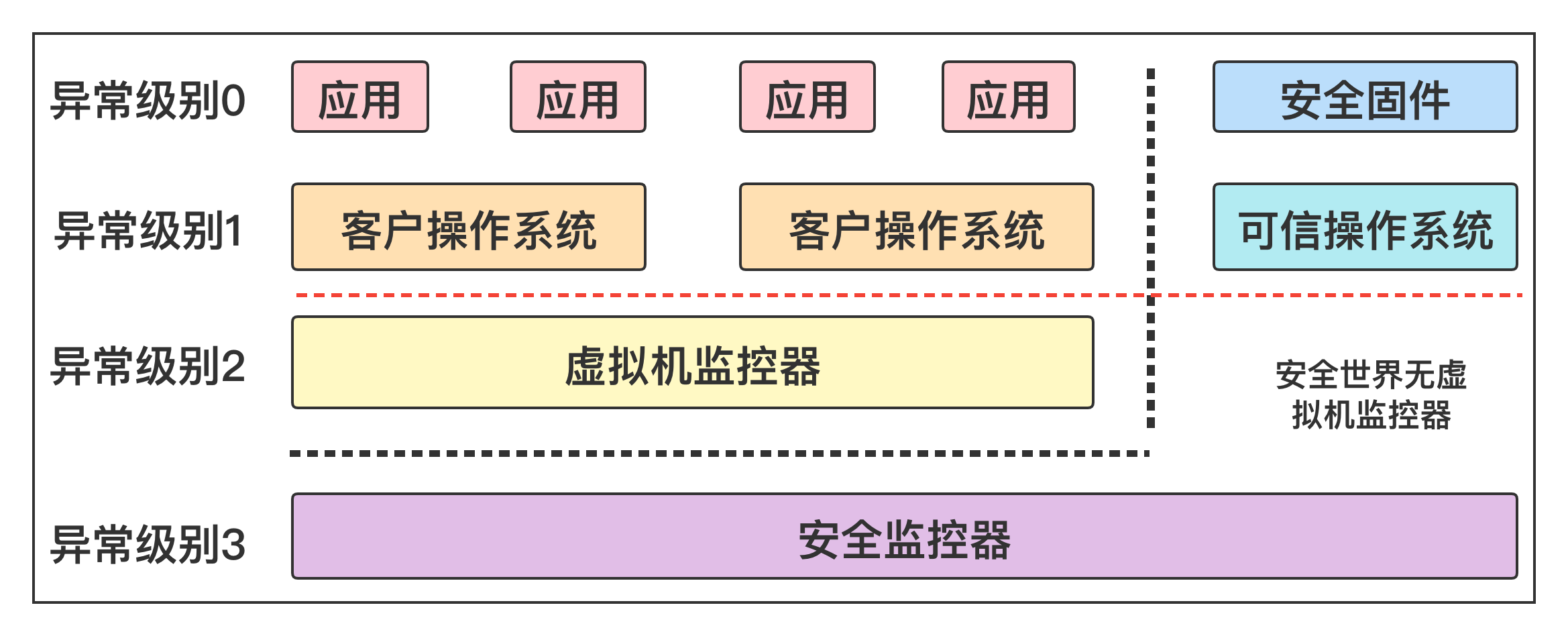
通常 ARM64 的进程执行在 EL0 级别,内核执行在 EL1 级别。
虚拟机是现在流行的虚拟化技术,在计算机上创建一个虚拟机,虚拟机里可以运行一个操作系统。常用的开源虚拟机管理软件是 QEMU,QEMU 支持基于内核的虚拟机 KVM,KVM 的特点是直接在处理器上执行客户机的操作系统,所以虚拟机的执行速度很快。
ARM64 架构的安全扩展定义了两种安全状态,正常世界和安全世界,两个世界只能通过异常级别 3 的安全监视器切换。

工具推荐
效率类
Notion
Notion 是一款提供笔记、任务、数据库、看板、维基、日历和提醒等组件的应用程序。用户可以将这些组件连接起来,来创建自己的系统,用于知识管理、笔记记录、数据管理、项目管理等。这些组件和系统可以单独使用,也可以与他人进行跨平台协作。Notion
一种用于实时视频稳定的新型相机路径规划算法
Introduction
视频稳定根据运动模型分为 2D 和 3D 方法。 第一种方法是 2D 视频稳定 [2],它使用 2D 运动模型(例如简单的平移模型、2D 刚性模型和 2D 仿射模型 [3-12])描述两个连续帧之间的关系。 如果相机在 3D 空间中沿 x 轴和 y 轴的旋转很小,则 2D 视频稳定可提供良好的性能 [13]。 然而,随着相机运动变得动态,二维运动模型无法描述连续帧之间的几何关系,性能非常有限。 lee 等 提出了一种无需明确估计相机运动即可直接稳定视频的方法 [14]。 该方法找到一组变换来平滑特征轨迹 [15, 16] 并稳定视频。
第二种方法是 Buehler 等人引入的 3D 视频稳定 [17]。早期的 3D 方法使用来自运动的结构 (SFM) 技术重建场景和相机运动的 3D 模型 [18]。然后在新的 3D 相机路径上渲染稳定的视图 [17, 19]。 3D 视频稳定提供比 2D 方法更好的性能。由于这些 3D 方法在处理缺乏视差的视频时经常失败,因此它们在许多情况下并不实用 [20]。 Liu 提出了结合 2D 和 3D 视频稳定优点的子空间视频稳定 [21],然而,由于长特征轨迹的数量不足,这种方法对于包含动态运动的视频通常会失败 [20]。因此,Wang [20] 针对 3D 重建困难或长特征轨迹不可用的视频提出了视频稳定。Liu 等人 [22] 提出了一种运动模型 SteadyFlow,它是一种通过强制强空间相干性的特定光流。Grundmann 等人基于单应性混合模型 [23],提出了免校准滚动快门去抖。 Dong 提出了使用基于帧间单应性估计的运动模型的实时应用视频稳定 [24]。Ringaby 等人提出了一种通过将相机旋转参数化为连续曲线来校正和稳定视频的方法 [25]。Karpendo 等人建议使用陀螺仪进行视频稳定和滚动快门校正 [26]。 Lee 提出了基于人类视觉系统的视频稳定 [27]。