ISP Raw 域之 BayerDemosaic
Bayer Demosaic 概述
RAW 域的最后一步处理是 Demosaic,将像素从 RAW 域变换到 RGB
域进行下一阶段的处理。Demosaic 算法的主要难点在于,RAW
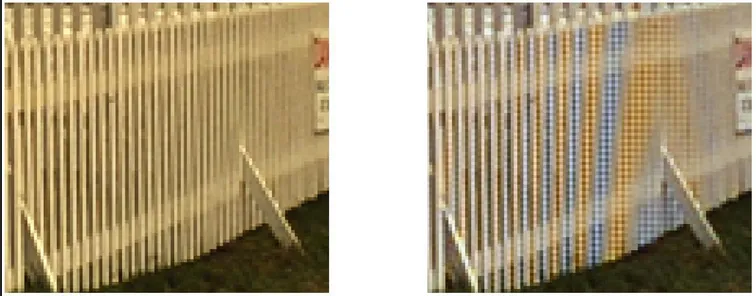
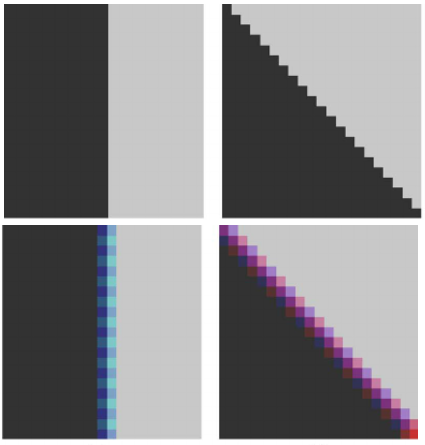
域的任何一个像点(photosite)只包含一个真实的采样值,而构成像素(R,G,B)的其它两个值需要从周围像点中预测得到。既然是预测,就一定会发生预测不准的情况,这是不可避免的,而预测不准会带来多种负面影响,包括拉链效应(zipper
artifacts),边缘模糊,颜色误差等。