原图
多元函数微分
多元函数及其邻域
二元函数的严格定义:
假设D是二维向量(x,y)的集合,D上的二元函数 f是一个映射法则,它对D内的每一个有序对(x,y)指定唯一的一个实数:
z=f(x,y),(x,y)∈D
如果用P来代替(x,y)的话,也可以写作:
z=f(P),P∈D
D称为f的定义域,x、y(或(x,y),或P)称为f的自变量,z称为f的因变量。
如果定义域D是更高维的向量的集合,也就是说自变量为更高维的向量,那么
f可以称为多元函数,也叫作多变量函数。
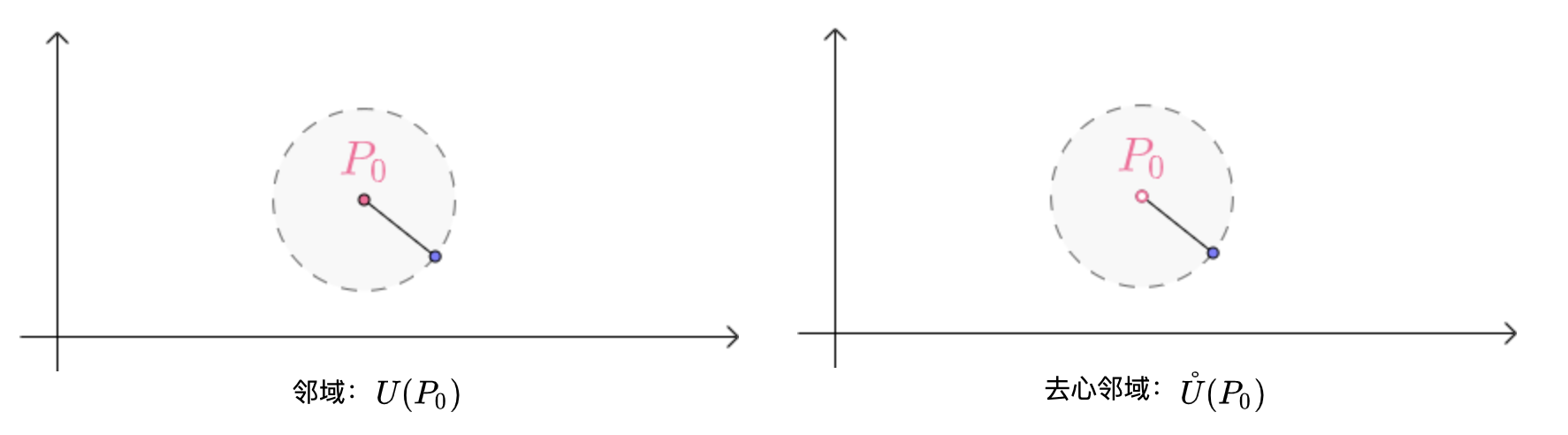
邻域和去心邻域:
二维向量的邻域要比一维向量的复杂。对于二维向量P0(x0,y0)而言,半径为δ 邻域可以表示为平面点集:
U(P0,δ)={(x,y) ∣ (x−x0)2+(y−y0)2<δ2}
多元函数极限和连续
-
聚点:
如果对于任意给定的δ>0,点P的去心邻域U˚(P,δ)内总有平面点集E中的点,那么称点P为E的聚点。
定义聚点是为了保证,从P0(x0,y0)的某去心邻域内的某一点P(x,y)出发,至少能找到一串完全在 E 中的点来靠近P0
-
二元函数极限的定义:
设二元函数f(x,y)的定义域为D,P0(x0,y0)是D的聚点。如果存在常数L,对于任意给定的正数ϵ,总存在正数δ,使得当点P(x,y)满足下列条件时:
(x,y)∈D∩U˚(P0,δ)
都有:
∣f(x,y)−L∣<ϵ
成立,那么就称常数L为函数f(x,y)当(x,y)→(x0,y0)时的极限,记作:
(x,y)→(x0,y0)limf(x,y)=L或、quadf(x,y)→L ( (x,y)→(x0,y0) )
因为这是二元函数的极限,所以也称作二重极限。
-
连续:
设二元函数f(x,y)的定义域为D,P0(x0,y0)是D的聚点,且P0∈D,如果:
(x,y)→(x0,y0)limf(x,y)=f(x0,y0)
那么称函数f(x,y)在点P0(x0,y0)连续。
全微分
设函数z=f(x,y)在点(x0,y0)的某邻域内有定义,假设:
Δx=x−x0,Δy=y−y0
如果函数z=f(x,y)在点(x0,y0)的全增量:
Δz=f(x0+Δx,y0+Δy)−f(x0,y0)
可以表示为:
Δz=AΔx+BΔy+o(ρ)=AΔx+BΔy+ϵ1Δx+ϵ2Δy
其中A、B不依赖于Δx、Δy,且:
ρ=(Δx)2+(Δy)2,Δx→0limϵ1=0,Δy→0limϵ2=0
那么称z=f(x,y)在点(x0,y0)处可微分,而AΔx+BΔy称为z=f(x,y)在点(x0,y0)处的全微分(或称为切平面),记作dz,即:
dz=Adx+Bdy
可以类比单变量微分的定义,单变量微积分是以直线代替曲线,双变量全微分是以平面代替曲线。
偏导数
-
关于x的偏导数:
∂x∂f∣∣∣∣∣(x0,y0)=dxdf(x,y0)∣∣∣∣∣x=x0=h→0limhf(x0+h,y0)−f(x0,y0)
-
关于y的偏导数:
∂y∂f∣∣∣∣∣(x0,y0)=dydf(x0,y)∣∣∣∣∣y=y0=h→0limhf(x0,y0+h)−f(x0,y0)
-
与全微分的关系:
如果函数z=f(x,y)在点(x0,y0)可微分,那么该函数在点(x0,y0)的偏导数fx(x0,y0)、fy(x0,y0)必定存在,且z=f(x,y)在点(x0,y0)的全微分为:
dz=fx(x0,y0)dx+fy(x0,y0)dy
方向导数与梯度
对于二元函数z=f(x,y),沿某单位向量:
u=(u1u2)
在(x0,y0)点的方向导数为:
∂u∂f∣∣∣∣∣(x0,y0)=t→0limtf(x0+tu1,y0+tu2)−f(x0,y0),t∈R
单位向量还可以用该向量的方向余弦cosα和cosβ表示,即:
u=(u1u2)=(cosαcosβ)
所以方向导数也常表示为:
∂u∂f∣∣∣∣∣(x0,y0)=t→0limtf(x0+tcosα,y0+tcosβ)−f(x0,y0),t∈R
- 模长:该方向向量的模长是方向导数的最大值。
- 方向:该方向向量的方向正是取得最大方向导数的方向。
- 投影:它向某单位向量u的投影就是对应的方向导数。
该方向向量就称为梯度,记作:
∇f(x0,y0)=gradf(x0,y0)=(fx(x0,y0)fy(x0,y0))=fx(x0,y0)i+fy(x0,y0)j
直观的理解就是:
- 沿着梯度向量方向走,能以最快的速度到达山顶。
- 逆着梯度向量方向走,能以最快的速度到达山脚。
- 和梯度向量方向垂直,此时坡度为 0,即不上山也不下山。
全导数
若z=f(x,y)是可微分的,而 x 和 y 是 t 的可导函数,则 z 是 t 的可导函数,并且:
dtdz=∂x∂zdtdx+∂y∂zdtdy
这个导数可以看作过切点的曲线的导数,所以又被称为全导数。
总结:
\begin{array}{c|c}
\hline
\quad \quad&\quad 描述、quad &\quad 公式 \quad\\
\hline
\\
\quad 偏导数 \quad&\quad \begin{aligned}y=y_0\ 和、x=x_0\ 两平面、\ \\与曲面相交所得曲线的导数、end{aligned}\quad&\quad f_x=\frac{\partial f}{\partial x},f_y=\frac{\partial f}{\partial y}\quad \\
\\
\hline
\\
\quad 方向导数 \quad&\quad\begin{aligned}垂直于 xy 的平面、quad\quad\ \ \\与曲面相交所得曲线的导数、\ \end{aligned}\quad&\quad \frac{\partial f}{\partial u}=f_x\cos\alpha+f_y\cos\beta\quad\\
\\
\hline
\\
\quad 全导数 \quad&\quad\begin{aligned}垂直于 xy 的曲面、quad\quad\ \ \\与曲面相交所得曲线的导数、\ \end{aligned}\quad&\quad\frac{\mathrm{d}z}{\mathrm{d}t}=\frac{\partial z}{\partial x}\frac{\mathrm{d}x}{\mathrm{d}t}+\frac{\partial z}{\partial y}\frac{\mathrm{d}y}{\mathrm{d}t}\quad\\
\\
\hline
\end{array}
雅可比矩阵
-
二元函数的导数:
二元函数z=f(x,y)的微分,微分在dxdydz坐标系中的方程为:
dz=fxdx+fydy
可以改写为矩阵的形式:
dz(dz)=T(fxfy)dxy(dxdy)
或者写作:
dz=Tdxy
-
一般的多元函数:
y=f(x1,x2,⋯,xn),(y,x1,x2,⋯,xn∈R)
如果可微的话,那么微分方程为:
dy=fx1dx1+fx2dx2+⋯+fxndxn
可以改写为矩阵的形式:
dy(dy)=T(fx1fx2⋯fxn)dx⎝⎜⎜⎜⎜⎛dx1dx2⋮dxb⎠⎟⎟⎟⎟⎞
或者写作:
dy=Tdx
其中矩阵 T 就是该多元函数的导数。
-
二元方程组的导数:
⎩⎪⎪⎨⎪⎪⎧dz=∂x∂fdx+∂y∂fdydw=∂x∂gdx+∂y∂gdy
可以写成矩阵的形式:
dv(dzdw)=T(∂x∂f∂x∂g∂y∂f∂y∂g)du(dxdy)
或者写作:
dv=Tdu
其中矩阵 T 就是该方程组所代表的函数的导数。
-
雅可比矩阵(多元方程组的导数矩阵):
假如f1,f2,⋯,fn都是x1,x2,⋯,xm的函数,并且相对于各个自变量的偏微分都存在,那么定义 T 为:
T=∂(x1,x2,⋯,xm)∂(f1,f2,⋯,fn)=⎝⎜⎜⎜⎜⎜⎛∂x1∂f1∂x1∂f2⋮∂x1∂fn∂x2∂f1∂x2∂f2⋮∂x2∂fn⋯⋯⋱⋯∂xm∂f1∂xm∂f2⋮∂xm∂fn⎠⎟⎟⎟⎟⎟⎞
该矩阵T称为雅可比矩阵。因为雅可比矩阵的英文名为 Jacobian Matrix,所以上述矩阵又常写作:
J=∂(x1,x2,⋯,xm)∂(f1,f2,⋯,fn)
-
海森矩阵:
一元导数y=f(x)的二阶导数就是连续两次使用dxd:
dx2d2y=dxd(dxdy)
类似的,二元函数z=f(x,y)的二阶导数就是连续两次计算雅可比矩阵:
∂(x,y)2∂2z=∂(x,y)∂(∂(x,y)∂z)=(fxxfyxfxyfyy)
二阶导数又称为海森矩阵(Hessian Matrix),所以常用 H 来表示这个矩阵:
H=∂(x,y)2∂2z=(fxxfyxfxyfyy)
海森矩阵可以判断图像的凹凸性。
此外关于隐函数的求导,多元函数的极值求法这里不再列出,详细可以参考相关书籍。
重积分
二重积分
设f(x,y)是有界闭区域D上的有界函数,将闭区域D任意分成n个小闭区域:
ΔA1,ΔA2,⋯,ΔAi,⋯,ΔAn
其中ΔAi表示第i个小闭区域,也表示它的面积,规定ΔAi中最长的直径(一个闭区域的直径是指区域上任意两点间距离的最大者)为λ,在每个ΔAi内任取一点(xi,yi),可以得到级数:
i=0∑nf(xi,yi)ΔAi
如果当λ→0时,无论如何划分闭区域D,无论怎样选取(xi,yi),该级数的极限总是存在,那么称此极限为函数f(x,y)在闭区域D上的二重积分,记作:
∬Df(x,y)dA=λ→0limi=0∑nf(xi,yi)ΔAi
其中f(x,y)称为被积函数,dA称为面积微分,x与y称为积分变量,D称为积分区域。
二重积分的性质
设f(x,y),g(x,y)都是有界闭区域D上的有界函数,α、β为常数,则:
-
齐次性:
∬Dαf(x,y)dA=α∬Df(x,y)dA
-
可加性:
∬D(f(x,y)+g(x,y))dA=∬Df(x,y)dA+∬Dg(x,y)dA
-
推论:
∬D(αf(x,y)±βg(x,y))dA=α∬Df(x,y)dA±β∬Dg(x,y)dA
-
区域可加性:
如果闭区域D被有限条曲线分为有限个部分闭区域,那么D上的二重积分等于各部分闭区域上的二重积分之和。
-
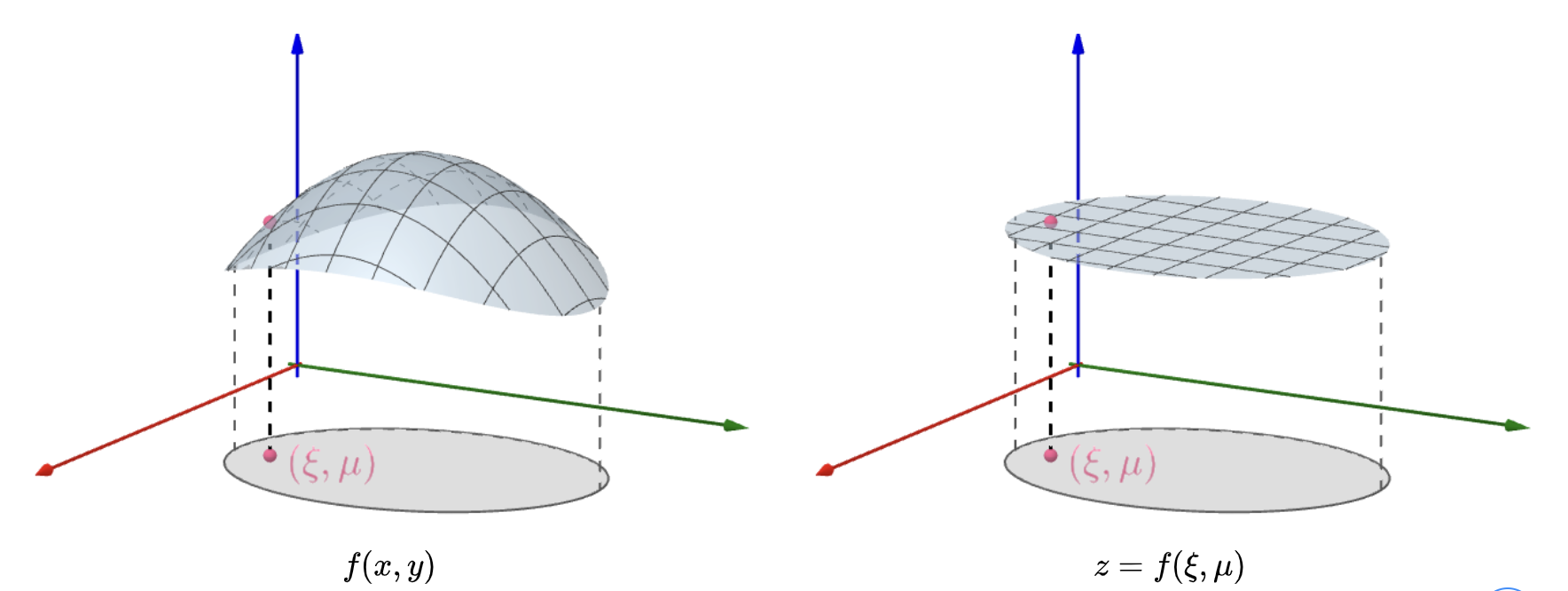
二重积分中值定理:
设函数f(x,y)在闭区域D上连续,A是区域D的面积,则在D上至少存在一点(ξ,μ),使得:
∬Df(x,y)dA=f(ξ,μ)A
二重积分法
弱富比尼定理
设有矩形区域R:
R={(x,y)∣a≤x≤b,c≤y≤d}
若f(x,y)在区域R上连续,则:
∬Rf(x,y)dA=∫cd[∫abf(x,y)dx]dy=∫ab[∫cdf(x,y)dy]dx
将二重积分变为,先积 x 后积 y(或先积 y 后积 x)的二次积分。
强富比尼定理
若f(x,y)在区域D上连续:
- 若区域 D 为a≤x≤b,g1(x)≤y≤g2(x),其中g1、g2在[a,b]上连续,则:
∬Df(x,y)dA=∫ab[∫g1(x)g2(x)f(x,y)dy]dx
- 若区域 D 为c≤y≤d,h1(y)≤x≤h2(y),其中h1、h2在[c,d]上连续,则:
∬Df(x,y)dA=∫cd[∫h1(y)h2(y)f(x,y)dx]dy
可见,和富比尼定理的较弱形式不一样,这里是不能交换积分顺序的。
坐标系变换
有时候切换一下坐标系问题会变得简单的多,为此研究在坐标变换后的多重积分也是很有价值的。
在区域 D 上,如果xy直角坐标系和uv直角坐标系之间存在如下的坐标变换函数,且x(u,v)、y(u,v)在区域 D 上有一阶连续偏导数(这是为了保证可以找到最佳线性近似):
{x=x(u,v)y=y(u,v)
如果雅可比行列式存在且不为 0:
∣J∣=∣∂(u,v)∂(x,y)∣=∣∣∣∣∣∂u∂x∂u∂y∂v∂x∂v∂y∣∣∣∣∣=0
则区域 D 上在xy直角坐标系下的面积为:
∬D dx dy=∬D∥J∥du dv
所以,z=f(x,y)在区域 D 上的体积为(在xyz直角坐标系下的体积):
∬Df(x,y)dx dy=∬Df(x(u,v),y(u,v))∥J∥du dv
三重积分
设f(x,y,z)是有界闭区域Ω上的有界函数,将闭区域Ω任意分成n个小闭区域:
ΔV1,ΔV2,⋯,ΔVi,⋯,ΔVn
其中ΔVi表示第i个小闭区域,也表示它的体积,规定ΔVi中最大的体积为λ:
λ=max(ΔVi)
在每个ΔVi内任取一点(ξi,μi,ζi),可以得到级数:
i=0∑nf(ξi,μi,ζi)ΔVi
如果当λ→0时,无论如何划分闭区域Ω,无论怎样选取(ξi,μi,ζi),该级数的极限总是存在,那么称此极限为函数f(x,y,z)在闭区域Ω上的三重积分,记作:
∭Ωf(x,y,z)dV=λ→0limi=0∑nf(ξi,μi,ζi)ΔVi
其中f(x,y,z)称为被积函数,dV称为体积微分,x、y以及z称为积分变量,Ω称为积分区域。
三重积分法
富比尼定理
区域 E 可以表示为:
E={(x,y,z)∣a≤x≤b,g1(x)≤y≤g2(x),u1(x,y)≤z≤u2(x,y)}
那么通过富比尼定理,函数f(x,y,z)在区域 E 上的三重积分可以如下计算:
∭Ef(x,y,z)dV=∬D[∫u1(x,y)u2(x,y)f(x,y,z)dz]dA=∫ab∫g1(x)g2(x)∫u1(x,y)u2(x,y)f(x,y,z)dz dy dx
这样就将三重积分划为了方便计算的三次积分。
坐标系变换
同样变换坐标系是为了简化问题。这里直接给出坐标系变换积分公式:
-
柱面坐标系的体积微分:
通过雅可比行列式∣J∣,可得柱面坐标系函数w=f(ρ,θ,z)在区域 Ω上的三重积分为:
∭Ωf(ρ,θ,z)dV=∭Ωf(ρ,θ,z)∥J∥dρdθdz=∭Ωf(ρ,θ,z)ρdρdθdz
其中ρdρdθdz称为柱面坐标系的 体积微分。
-
球面坐标系的体积微分:
通过雅可比行列式∣J∣,可得球面坐标系函数w=f(r,φ,θ)在区域Ω上的三重积分为:
∭Ωf(r,φ,θ)dV=∭Ωf(r,φ,θ)∥J∥dr dφdθ=∬Ω∬(r,φ,θ)r2sinφdr dφdθ
其中r2sinφdrdφdθ称为球面坐标系的体积微分。
曲线积分与曲面积分
第一类曲线积分
设L为xOy面内的一条光滑曲线弧,函数f(x,y)在L上有界。在L上任意插入一点列P0、P1,⋯、Pn,把L分成n个小段。设第k个小段的长度为Δsk。又(ξk,ηk)为第k个小段上任意取定的一点,做乘积f(ξk,ηk)Δsk,并作和:
k=1∑nf(ξk,ηk)Δsk
如果当各小弧段的长度的最大值λ→0时,这和的极限总是存在,且与曲线L的分法及点(ξk,ηk)的取法无关,那么称此极限为函数f(x,y)在曲线L上的第一类曲线积分,记作:
∫Lf(x,y)ds=λ→0limk=1∑nf(ξk,ηk)Δsk
其中ds称为弧微分。
-
物理意义:
第一类曲线积分的物理意义还是很明显的,之前介绍过,如果μ(x,y)是曲线L的密度函数时,如下计算的是曲线质量:
m=∫Lμ(x,y)ds
而如果δ(x,y)是曲线L的电荷密度函数,那么如下计算的就是曲线的电荷量:
c=∫Lδ(x,y)ds
-
几何意义:
第一类曲线积分∫Lf(x,y)ds的几何意义就是求曲线 L 与曲面z=f(x,y)之间的面积:
-
性质:
- 性质 1:设α、β为常数,则:
∫L[αf(x,y)+βg(x,y)]ds=α∫Lf(x,y)ds+β∫Lg(x,y)ds
- 性质 2:设光滑曲线L可分为两个光滑曲线L1和L2,则:
∫Lf(x,y)ds=∫L1f(x,y)ds+∫L2f(x,y)ds
- 性质 3:设在光滑曲线 L 上有f(x,y)≤g(x,y),则:
∫Lf(x,y)ds≤∫Lg(x,y)ds
第二类曲线积分
设L为xOy面内从A点到B点的一条光滑曲线弧,函数P(x,y)、Q(x,y)在L上有界。在L上任意插入一点列P0、P1,⋯、Pn,把L分成n个有向小弧段:
Pk−1Pk,(k=1,2,⋯,n,P0=A,Pn=B)
设Δxk=xk−xk−1,Δyk=yk−yk−1,点(ξk,ηk)为Pk−1Pk上任意取定的点,做乘积P(ξk,ηk)Δxi,并作和:
k=1∑nP(ξk,ηk)Δxk,k=1∑nQ(ξk,ηk)Δyk
如果当各小弧段的长度的最大值λ→0时,和的极限总是存在,且与曲线L的分法及点(ξk,ηk)的取法无关,就称这两个极限为P(x,y)在有向曲线 L 上对坐标 x 的曲线积分:
∫LP(x,y)dx=λ→0limk=1∑nP(ξk,ηk)Δxk
以及Q(x,y)在有向曲线 L 上对坐标 y 的曲线积分:
∫LQ(x,y)dy=λ→0limk=1∑nQ(ξk,ηk)Δyk
以上两个积分也称为第二类曲线积分。
-
性质:
- 性质 1:设α、β为常数,则:
∫L[αF1(x,y)+βF2(x,y)]⋅ds=α∫LF1(x,y)⋅ds+β∫LF2(x,y)⋅ds
- 性质 2:设有向光滑曲线L可分为两个光滑有向曲线L1和L2,则:
∫LF(x,y)⋅ds=∫L1F(x,y)⋅ds+∫L2F(x,y)⋅ds
- 性质 3:设L是有向光滑曲线,L−是L的反向曲线,则:
∫LF(x,y)⋅ds=−∫L−F(x,y)⋅ds
两类曲线积分的关系
区别
- 第一类曲线积分针对的是曲线,而第二类曲线积分针对的是有向曲线。
- 第一类曲线积分,作用在曲线上的是标量;而第二类曲线积分,作用在曲线上的是向量。
联系
因为弧微分和有向弧微分的关系为τds=ds,所以:
∫LF⋅τds=∫LF⋅ds
左边为第一类曲线积分,右边为第二类曲线积分,可见这两类积分是可以互相转化的。
二维的散度和旋度
通量
在连续向量场F=Pi+Qj中的光滑闭曲线L,n为光滑闭曲线L的单位法向量(指向闭曲线外部),则F穿过L的流量,即通量为:
∮LF⋅nds=∮LPdy−Qdx
需要注意的是,上式从第一类曲线积分变为了第二类曲线积分,曲线的方向为逆时针。
散度
已知水流量为向量场F。用曲线LA来表示 A 圆,那么 A 圆的通量为:
TA=∮LAF⋅nds
假设 A 圆对应的面积为ΩA,圆缩到最小即ΩA→0,同时再除上面积ΩA,就得到了A点在向量场F中的通量密度,也称为 A 点在向量场F中的散度,即:
divF(A)=ΩA→0limΩA1∮LAF⋅nds
同样的,也可以算出 C 点的散度divF(C),两者谁大,就说明哪个水龙头的出水量更大。
环量
在连续向量场F=Pi+Qj中的光滑闭曲线L,τ为光滑闭曲线L的单位切向量τ(指向逆时针方向),则F对于L的环量为:
∮LF⋅τds=∮LPdx+Qdy
需要注意的是,上式从第一类曲线积分变为了第二类曲线积分,曲线的方向为逆时针。
旋度
已知水流量为向量场F。用曲线LA来表示A圆,那么A圆的环量为:
HA=∮LAF⋅τds
可见,环量会受到圆的大小的影响,所以来排除掉这个影响。假设 A 圆对应的面积为ΩA,圆缩到最小即ΩA→0,同时再除上面积ΩA,就得到了A点在向量场F中的环量密度,也称为A点在向量场F中的旋度,即:
curlF(A)=ΩA→0limΩA1∮LAF⋅τds
格林公式
格林公式的通量形式:
某光滑闭曲线 L 围成闭区域 D,定义在闭区域 D 上的向量场F=Pi+Qj,它的分量具有一阶连续偏导数,则F关于 L 的通量,可通过闭区域 D 上的散度求出:
闭曲线的通量 ∮LF⋅nds=∮LP dy−Q dx=闭曲线围成区域的通量之和 ∬D∂x∂P+∂y∂Q dx dy
格林公式的环量形式:
某光滑闭曲线 L 围成闭区域 D,定义在闭区域 D 上的向量场F=Pi+Qj,它的分量具有一阶连续偏导数,则F关于 L 的环量,可通过闭区域 D 上的旋度求出:
闭曲线的环量 ∮LF⋅τds=∮LP dx+Q dy=闭曲线围成区域的环量之和 ∬D∂x∂Q−∂y∂P dx dy
二重积分的基本定理
∬D∂x∂P+∂y∂Q dx dy=∮∂DP dy−Q dx
第一类曲面积分
设Σ为三维空间中的一个光滑曲面,函数f(x,y)在Σ上有界。把Σ上任意分为n个小曲面,第k个小曲面为ΔSk(该小曲面的面积也同样由ΔSk来表示)。设 (ξk,ηk) 是ΔSk上任意取的一点,做乘积f(ξk,ηk)ΔSk,并作和:
k=1∑nf(ξk,ηk)ΔSk
如果当各小曲面的面积的最大值λ→0时,和的极限总是存在,且与曲面Σ的分法及点(ξk,ηk)的取法无关,就称这此极限为f(x,y)在曲面Σ上的第一类曲面积分:
∬Σf(x,y)dS=λ→0limk=1∑nf(ξk,ηk)ΔSk
其中dS称为曲面微分。
第二类曲面积分
假设太阳表面为闭球面Σ,将所有的小曲面的通量加起来就得到闭球面Σ的通量,也就是太阳的通量:
∬ΣF⋅ndS
其中单位法向量n和面积微分dS组成了有向曲面,也称为有向面积微分:
ndS=dS
所以闭球面Σ的通量又可以写作:
∬ΣF⋅ndS=∬ΣF⋅dS
上述积分是向量场F在有向面积Σ上的积分,称为第二类曲面积分。
三维的散度和旋度
散度
假设闭曲面Σ围成的体积为V,和二维的情况一样,通量的密度就是散度:
divF=V→0limV1∬ΣF⋅ndS
假设向量场为F=Pi+Qj+Rk,可以证明散度还有一个偏导形式(较复杂,证明略):
divF=∂x∂P+∂y∂Q+∂z∂R
旋度
假设三维向量场为F=Pi+Qj+Rk,那么以下向量就为三维空间中的旋度:
curlF=(∂y∂R−∂z∂Q)i+(∂z∂P−∂x∂R)j+(∂x∂Q−∂y∂P)k
该向量的模就是环量密度,方向就是旋转轴向量。
格林公式新形式
通过∇算子,格林公式的通量形式可以改写为:
∮∂DF⋅nds=∬D∇⋅FdA
环量形式可以改写为:
∮∂DF⋅τds=∬D∇×F⋅kdA
环量公式中的kdA,其中dA指的是xy面上的平面,k是z轴的单位方向向量,也就是dA的单位法向量:
因此kdA其实表示的是有向平面:
kdA=dA
进而,格林公式的环量形式还可以改写为第二类曲面积分的形式:
∮∂DF⋅τds=∬D∇×F⋅dA
高斯公式和斯托克斯公式
高斯公式
存在有向光滑闭曲面(或者由几片有向光滑曲面组成)∂Ω,该曲面的正方向n指向外部。闭曲面∂Ω围成空间闭区域Ω,在该闭区域Ω上定义有向量函数F,它的各个分量具有一阶连续偏导数。那么有:
∂∫闭曲面的通量 ∫FF⋅ndS=闭曲面围成区域的通量之和 ∭ΩdivFdV=∭Ω∇⋅FdV
该定理称为高斯公式或者散度定理。
斯托克斯公式
假设存在有向光滑闭曲线(或者由几个有向光滑曲线组成)∂Σ,该有向曲线∂Σ为有向光滑曲面(或者由几个有向光滑曲面组成)Σ的边界,且有向曲线∂Σ的方向τ与、Sigma的正向n符合右手法则。在该有向曲面Σ上定义有向量函数F,它的各个分量具有一阶连续偏导数。那么有:
有向闭曲线的环量 ∮∂ΣF⋅ds=有向闭曲线围成有向曲面的环量之和 ∬ΣcurlF⋅dS=∬Σ∇×F⋅dS
该定理称为斯托克斯公式。
小结
在二维平面中,格林公式有两种形式,通量形式和环量形式:
∮∂DF⋅nds=∬DdivFdA=∬D∇⋅FdA∮∂DF⋅τds=∬DcurlF⋅dA=∬D∇×F⋅dA
在三维空间中,通量形式扩展为了高斯公式:
∬∂ΩF⋅ndS=∭ΩdivFdV=∭Ω∇⋅FdV
环量形式扩展为了斯托克斯公式:
∮∂ΣF⋅τds=∬ΣcurlF⋅dS=∬Σ∇×F⋅dS
关于无穷级数这里不列出了,后面在数学物理方法中再列出。
参考文献
《马同学的多变量微积分课程》
感兴趣的可以购买他的课程,写的很好(强烈推荐)!!!
[[CalculusPart1]]






